
校招笔记(七)_计算机基础_数据结构
我的校招记录:校招笔记(零)_写在前面 ,以下是校招笔记总目录。
| 备注 | ||
|---|---|---|
| 算法能力(“刷题”) | 这部分就是耗时间多练习,Leetcode-Top100 是很好的选择。 | 补充练习:codeTop |
| 计算机基础(上)(“八股”) | 校招笔记(一)__Java_Java入门 | C++后端后续更新 |
| 校招笔记(一)__Java_面对对象 | ||
| 校招笔记(一)__Java_集合 | ||
| 校招笔记(一)__Java_多线程 | ||
| 校招笔记(一)__Java_锁 | ||
| 校招笔记(一)__Java_JVM | ||
| 计算机基础(下)(“八股”) | 校招笔记(二)__计算机基础_Linux&Git | |
| 校招笔记(三)__计算机基础_计算机网络 | ||
| 校招笔记(四)__计算机基础_操作系统 | ||
| 校招笔记(五)__计算机基础_MySQL | ||
| 校招笔记(六)__计算机基础_Redis | ||
| 校招笔记(七)__计算机基础_数据结构 | ||
| 校招笔记(八)__计算机基础_场景&智力题 | ||
| 校招笔记(九)__计算机基础_相关补充 | ||
| 项目&实习 | 主要是怎么准备项目,后续更新 |
七、数据结构和算法
1. 如何对快排进行优化?
-
三数取中法和随机交换法
快排将选取的基准点经过调整放到合适的位置,之后将这个基准点左右两边的区间分别递归的进行快排。
如果基准点的数据比较小,将会导致调整后基准点处于靠近两侧的位置,那么两边的区间长度将会严重失去平衡.
三数取中法:指的是选取基准点之前我们可以拿出数列中间位置元素的值,将它和首尾的元素进行比较,之后将这三个数中的中间数交换到数列首位的位置,之后将这个数作为基准点,尽量减小之后的分区后左右两边的区间长度之差。
-
三路分割法
三路法同样是针对含有大量【重复数列】的优化。
3路法的思想是将数列分成3个区间,分别是小于、等于和大于基准点的区间。那么分区之后,对于等于基准点的区间内的元素,我们就不需要对其做任何处理了,只需要递归的处理小于和大于基准点的元素即可。
-
结合插入排序
当待排序序列的长度分割到一定大小后,使用插入排序。
- 对于很小和部分有序的数组,快排不如插排好。当待排序序列的长度分割到一定大小后,继续分割的效率比插入排序要差,此时可以使用插排而不是快排。
2.快排和堆排的区别?什么时候使用快排和堆排?
-
快排和堆排区别?
-
综合性能:实际应用中,虽然堆排序的时间复杂度要比快速排序稳定(快排最差退化成O(N^2)) ,但是统计意义上这种情况较少,所以综合性能还是快排更优;
-
交换次数: 对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序;
-
访问友好: 堆排序数据访问的方式没有快速排序友好。
对于快速排序来说,数据是顺序访问的;而堆排序来说,数据是跳着访问的。比如,堆排序中,最重要的一个操作就是数据的堆化。对堆顶节点进行堆化,会一次访问数组下标1,2,4,8的元素,而不是像快排那样,局部顺序访问,所以对CPU缓存是不友好的。
-
-
快排和堆排使用场景?
-
快排: 绝大多数场合。
-
堆排: topK问题、优先队列(需要在一组不停更新的数据中不停地找最大/小元素)
在N个元素中找到top K,时间复杂度是O(N log K),空间复杂的是O(K),而快速排序的空间复杂度是O(N)。
-
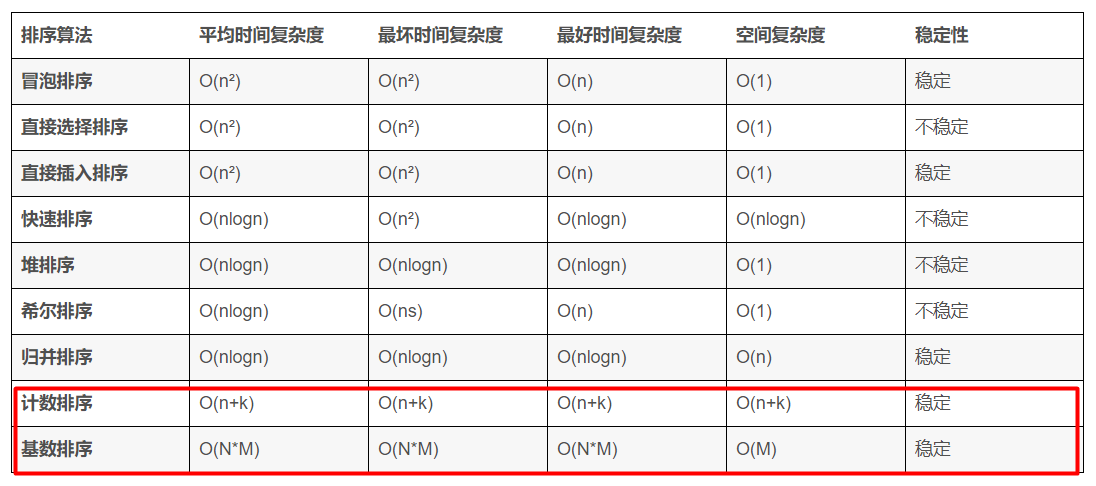
3. 【面试重点】有哪些排序算法,各算法的时间复杂度 ? 哪些是稳定的?为什么是稳定的?
3.1 如果数据大致有序的,用什么排序比较好?
如果是大致有序,用 插入排序 比较好:
- 直接插入排序是将第i个元素插入到已经排序好的前i-1个元素中 ,当元素基本有序时。和前i-1个元素末尾比较一次就可以直接插入。
在相比使用其它排序:
-
归并排序: 归并排序和数组是否有序无关,都是O(nlgn)。
归并排序是把一个有n个记录的无序文件看成由n个长度为1的有序子文件组成的文件,然后进行两两归并,得到[n/2]个长度为2或1的有序文件,再两两归并 。
-
快速排序: 数组基本有序时,此时如果使用基点是最后一个元素,划分的两个子数组极为不平衡,每次划分比较次数都很多。所以不推荐。
4. 二叉查找树,红黑树和平衡二叉树的区别?(有了二叉查找树、平衡树(AVL)为啥还需要红黑树?)
总结来说:平衡树是为了解决二叉查找树退化为链表的情况;而红黑树是为了解决平衡树在插入、删除等操作需要频繁调整的情况。
-
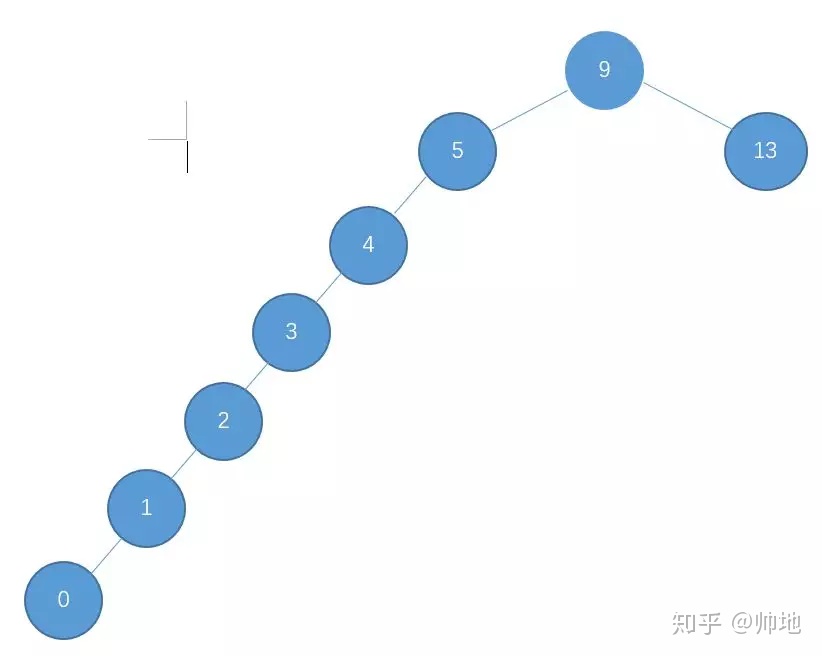
二叉查找树退化成单链表
正常使用二叉查找树是类似于二分查找 O(logn),但是极端情况:
-
构建的二叉树所有节点都只有右子树或左子树,此时时间复杂度退化成O(N)
-
-
平衡二叉树频繁左右旋
平衡二叉树就是为了解决二叉查找树退化成一颗链表而诞生了,平衡树具有如下特点:
-
具有二叉查找树的全部特性;
-
每个节点的左子树和右子树的高度差至多等于1。
避免了二叉查找树极端情况产生,但是:
- 每次进行插入/删除节点的时候,几乎都会破坏平衡树的第二个规则,进而我们都需要通过左旋和右旋来进行调整,使之再次成为一颗符合要求的平衡树。
平衡树性能大打折扣。
-
-
红黑树规不需要频繁着调整
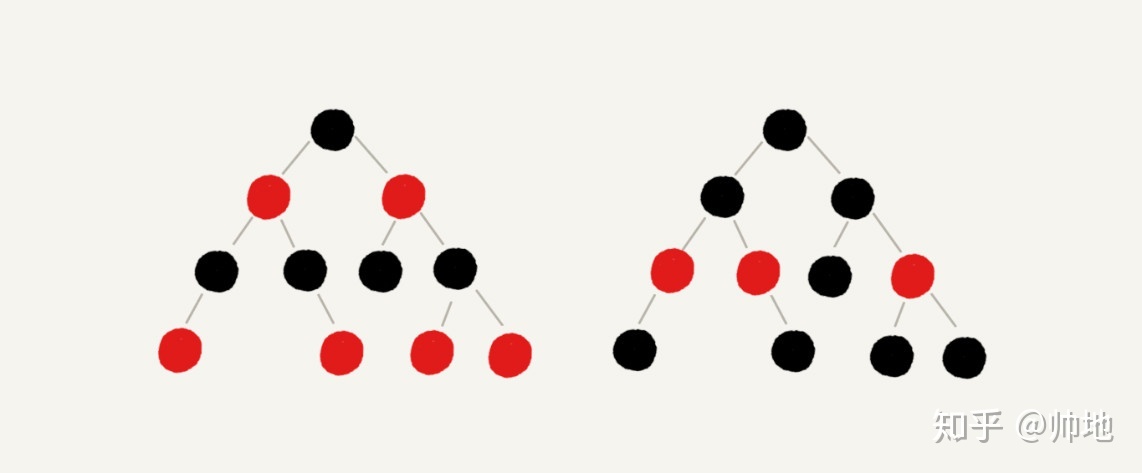
红黑树具有如下特点:
最坏情况下,也能在 O(logn) 的时间复杂度查找到某个节点。
- 与平衡树不同的是,红黑树在插入、删除等操作,(🚩*1)不会像平衡树那样,频繁着破坏红黑树的规则,所以不需要频繁着调整,这也是我们为什么大多数情况下使用红黑树的原因;
- 但是,单单在查找方面的效率的话,平衡树比红黑树快。
- 具有二叉查找树的特点;
- 根节点是黑色的;
- 每个叶子节点都是黑色的空节点(NIL),也就是说,叶子节点不存数据;
- 任何相邻的节点都不能同时为红色,也就是说,红色节点是被黑色节点隔开的;
- 每个节点,从该节点到达其可达的叶子节点是所有路径,都包含相同数目的黑色节点。
4.1 为什么红黑树不需要频繁调整?
详细理解红黑树一篇不错的文章:百图详解红黑树,想不理解都难
平衡二叉树这种高度差为 1 的要求太严格了,尤其是对于频繁删除、插入的场景非常浪费时间。
但是由于红黑树:
- 具有二叉树所有特点。
- 每个节点只能是红色或者是黑色。
- 根节点只能是黑色,且黑色根节点不存储数据。
- 任何相邻的节点都不能同时为红色。
- 红色的节点,它的子节点只能是黑色。
- 从任一节点到其每个叶子的所有路径都包含相同数目的黑色节点。
不追求插入、删除等操作绝对平衡,只需满足上述条件即可。它的旋转次数少,插入最多两次旋转,删除最多三次旋转。
所以在搜索、插入、删除操作较多的情况下,红黑树的效率是优于平衡二叉树的。
5.快速排序的过程 ?
-
手撕一个二分查找 和快排?
-
二分查找
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25// binary search
public int binarySearch(int[] arr, int value)
{
int left = 0,right = arr.length-1;
int mid ;
while (left<=right) //*<= 而不是<
{
mid = (left+right)/2;
if(value == arr[mid])
{
return mid; // 如果数组存在待查找元素,按照逻辑一定会是mid
}
else if(value < arr[mid])
{
right = mid-1;
}
else // value > arr[mid]
{
left = mid+1;
}
}
return -1;
} -
快速排序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27public int[] quick_sort(int[] arr,int left,int right)
{
if(right<=left){return null;}
// 选择基准:数组最右数字
// *如果选择最左,思考交换过程
// *partition 左侧始终是比pivot小的数
int pivot = arr[right];
int partition = left;
// 遍历分区元素
// 小于基准的放基准左边,大于的放基准右边
// * 终止条件:i < right 而非 right-1!
for(int i=left; i< right;i++)
{
if(arr[i]<pivot) // 实际只交换小于到左边即可
{
swap(arr,i,partition);
partition++;
}
}
// *基准插入位置partition位置
swap(arr,partition,right);
//递归的排序
quick_sort(arr,left,partition-1);
quick_sort(arr,partition+1,right);
return arr;
}
-
6. 布隆过滤器原理?为什么使用多个哈希函数?其它相关应用?
“布隆说:不存在的那么一定不存在”
“布隆说:存在的那么只是可能存在”
7.1 从HashMap说起—当你判断某个元素时候你在想什么?
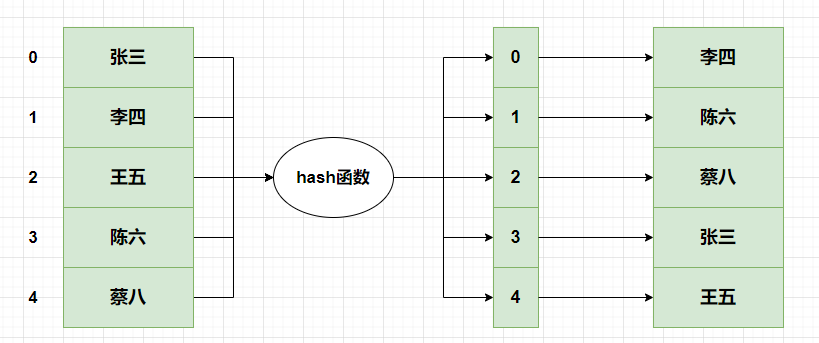
通常我们怎么判断一个数组,是否存在某个元素呢?
聪明的你一定想到HashMap:(1)HashMap将数组所有元素使用哈希函数,映射到HashMap上(HashMap本身也是一个数组)(2)然后就可以在O(1)级别判断某个元素是否存在。
但是这种做法通常会导致以下问题:
- 一旦数组很大,比如上亿,HashMap将会占据非常大的内存;
- 数组很大,不大可能一次性能在内存构建HashMap;
- 而且HashMap,通常存在负载因子,是不能充分利用内存的。
为此,我们可以从以下方向优化:
-
只存储key。但是,因为我们只要判断某个元素(key)是否存在, 不需要取出对应key的value—也就是不需要存储value。
-
key映射为bit数组索引。key映射为
bit数组索引,即位图对应索引, 索引对应数值用0/1就可以标识为是否存在该key。
为此,我们可以【第一阶段优化】如下:
看样子似乎是满足我们要求了,但是依旧存在以下问题:
- 只使用一个
hash函数,空间利用率低。
一个hash函数只能将key散列到一个位置 ,虽然hash尽量优良映射均匀,但是空间利用率依然不算高。
因此,我们可以多个函数,将key同时映射到多个位置,即使发生哈希冲突,某个位置被覆盖,其它依旧存在,变相的降低了哈希冲突。
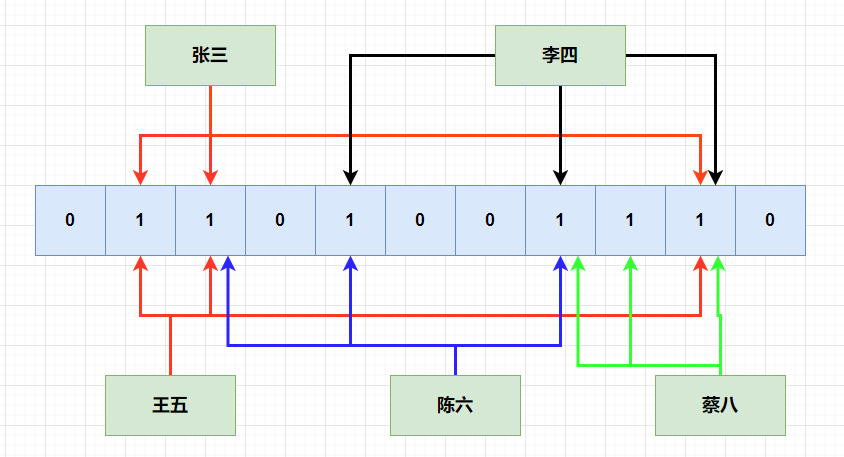
7.2 数据结构及原理
布隆过滤器,最终结构如下:一个bit数组,采用多个hash函数进行映射。
7.3 布隆函数优缺点
- 优点
存储/插入/查询时间复杂度,都是常数级别O(1)- 保密性好,因为不需要存储数据本身
- 存储数据大,可以存储非常大的数据本身
- 缺点
- 随着元素数量增加,误算率会增加
- 不能删除元素,因为删除某个元素,要把其对应所有hash函数散列的位置如A,B,置为
0。其它元素的可能散列到位置A,再去判断这个元素是否存在就会出现误判。
7.4 应用场景
-
解决缓存穿透,防止不存在的元素去查询数据库
-
防止重复被攻击,用户第一次请求,将请求参数放入布隆过滤器中,当第二次请求时,先判断请求参数是否被布隆过滤器命中。可以提高缓存命中率
-
判断用户是否阅读过某视频或文章, 比如抖音或头条,当然会导致一定的误判,但不会让用户看到重复的内容。
 微信
微信 支付宝
支付宝
